Mariaani süvik kutsub: "Okeanonautide" võidujooks vetesügavustesse
Maismaa kõrgeimasse punkti – Džomolungma tippu – jõudis Edmund Hillary koos šerpa Tenzing Norgayga 60 aastat tagasi. Teade sellest saavutusest jõudis Londonisse Elizabeth II kroonimise ajal ning seda saavutust hindas kuninganna nii kõrgelt, et tõstis Hillary rüütliseisusse.
Vetesügavustesse soovitakse sukelduda eeskätt seal peituvate tohutute ressursside uurimiseks ja kasutuselevõtuks. Selle teeb võimalikuks viimaste aastakümnete tehniline areng. Inimese sukeldusrekord on ju vaid 127 m (akvalangiga 145 m, tuukriülikonnas 700 m). Miks nii suur erinevus? Selle põhjuseks on eeskätt erinevus väliskeskkonna rõhus. Mäkketõusu takistab kõrgematel mägedel madal õhurõhk, sukeldumisel aga suur ülerõhk, mis tõuseb 1 atmosfääri võrra iga 10 m kohta. Tänaseks on Džomolungma tippu, ligi 9 km kõrgusele, tõusnud mitu tuhat inimest, kuid ookeanipõhja sügavaimasse punkti, milleks on Mariaani süviku lõik nimega Challenger Deep (ca 11 km), on seni jõudnud vaid kolm inimest.
Ajalooline suursaavutus
Meresügavuste vallutamisel sai suursündmuseks Jacques Piccardi ja Donald Walshi jõudmine batüskaafi Trieste II abil Challenger Deepi põhja 23. jaanuaril 1960. Varasem sukeldumiste sügavusrekord (3139 m) ületati mitmekordselt ning see jäi löömatuks kuni möödunud aastani. Trieste disainis Jacques Piccardi isa, Šveitsi füüsik Auguste Piccard. Batüskaafi kõige vastutusrikkam osa – kerakujuline meeskonnaruum (gondel), mis pidi vastu pidama hiiglaslikule veesurvele (tuhat tonni ruutmeetrile!), oli valmistatud 12,7 cm paksustest terasplaatidest. Hiljem batüskaafi konstruktsiooni täiustati oluliselt ning seetõttu sai ta nimeks Trieste II.
Allveetehnika arengusuunad
Valdav osa meresügavusi ei ületa 4–5 km (98% meresügavustest jääb alla 6 km), mistõttu on töödeks ning praktiliste ülesannete lahendamiseks piisav, kui vastava laeva sukeldussügavus jääb nendesse piiridesse ning panustatakse muudesse olulisematesse tehnilistesse näitajatesse. Seda sorti süvasukeldite tüüpilisemateks ning teenekamateks esindajateks olid Alvin (1964. a) ja Soomes ehitatud Mir 1 ja 2 (1987. a), mis on osalenud arvukates uurinisprojektides, sealhulgas näiteks lennuõnnetusel merre kukkunud USA vesinikpommi otsimisel või kuulsate Bismarcki ja Titanicu vrakkide uurimisel ning filmimisel.
Allveelaevade tormiline areng algas 20. sajandil ja seda eeskätt militaarsetel eesmärkidel ning neil oli suur roll juba Esimeses maailmasõjas, kuid eriti Teises maailmasõjas, kus ainuüksi Saksamaa valmistas neid sadu ja sadu. Militaarsete allveelaevade arendajate peaeesmärkide hulka ei kuulunud sukeldussügavus, pigem vee all püsimise kestus, relvadest rääkimata. Seetõttu jäi nende allveelaevade sukeldussügavus reeglina 1 km piiridesse.
Tsiviilotstarbeliste allveelaevade (sh süvasukeldite) tehnilise arengu peasuund keskendub võimele töötada merede/ookeanide põhjas, seda nii teaduslikel eesmärkidel (merepõhja kaaardistamine, selle geoloogia ja loodusvarade ning fauna ja floora uurimine) kui ka tehnorajatiste (puurtornide, torustike ja kaablite) paigaldamisel ning hooldamisel, aga ka päästetöödel. Allveetehnika areng toimub paralleelselt kahes põhisuunas – mehitatud ja mehitamata sukeldid (nn ROV e remotely operated vehicle). Ka sel alal toimub konkurents ja võistlus nii riikide, firmade kui ka üritajate vahel, millest üks osa on ka Mariaani süviku „vallutamine”.
Kaikō jt
See oli esimene mehitamata alus, mis jõudis Mariaani süvikusse. On loomulik, et Jaapan kui mereriik panustab tugevasti ka (süva)mereuuringutesse. Nende mereuuringute agentuuri JAMSTEC eestvõttel töötati välja 10,6tonnine robotallveelaev Kaikō (ookeani süvis), mis jõudis Mariaani süvikus sügavusele 10 911 m 24. märtsil 1995 ning tegi ka foto- ja videovõtteid senitundmatutest torusoolelistest olenditest. 250 sukelduse tulemusena avastati muu hulgas ka 350 senitundmatut bioloogilist liiki. Kahjuks tegi tema edukale tegevusele lõpu kaheksa aastat hiljem taifuun Chan-Hom. Ajutiselt sai tema asendajaks Kaikō 7000II, kuid päriselt asendajaks (ja edasiarendatuks) sai siiski ABISMO (Automatic Bottom Inspection and Sampling Mobile), mis laskus Mariaani süvikusse 2008. a juunis koguni kolmel korral, jõudes sügavuseni 10 258 m.
Jaapanlastele pakkusid tugevat konkurentsi ameeriklased. USA okeanograafia instituudis WHOI töötati välja hübriidne autonoomne süvasukeldi Nereus (Nereus oli teatavasti kreeka mütoloogiline meres elav titaan – merestiihia jumala Pontuse ja jumalanna Gaia poeg), mis sukeldus Mariaani süviku põhja 10 902 m sügavusele 31. mail 2009. aastal. Nereuse hübriidne olemus väljendub selles, et ta võib väiksemates sügavustes töötada täiesti autonoomselt, kuid suurtes sügavustes töötab ta, ühendatuna pinnal paikneva tugilaevaga juuspeene fiiberoptilise kaabliga, mille üldpikkus on koguni 40 km ning laeva sukeldumisel keritakse lahti spetsiaalsest kanistrist. Kolmetonnise Nereuse pikkus on 4,25 m ja laius 2,3 m ning energiallikaks on 2000 liitiumioonakut. Proovide võtmiseks on ta varustatud kergekaalulise, kuid tugevajõulise robotkäe-manipulaatoriga.
Mariaani süviku sügavaima lõigu nimega Challenger Deep on võtnud sihikule ka firma Triton Subs koos uudseid klaasisorte tootva Rayotek Scientificuga, et valmistada uut tüüpi süvasukeldi Triton 36000, mille kolme inimest mahutav gondel on ideaalse kera kujuline ning valmistatud erilisest borosilikaatsest klaasist, mis surve all muutub isegi veel tugevamaks. Mehitatud süvasukelditele on kriitilisteks kohtadeks meeskonnagondli välisseinas paiknevad erinevate materjalide (näiteks klaas ja metall) ühenduskohad, sest nad reageerivad rõhu ja temperatuuri muutustele erinevalt. Triton 36000 juures on need välistatud ja monitooringu ning juhtimisfunktsioonid on realiseeritud fiiberoptika abil.
Kopsakas auhind õhutab võistlema
Trieste sukeldumise 50. aastapäeval 2010. aastal kuulutas X Prize Foundation välja 10 miljoni dollarise auhinna Mariaani süvikusse sukeldujale, kuid seejuures oli ka üks eritingimus – nimelt tuleb laskuda kaks korda. See tundus olevat magus suutäis suuri väljakutseid armastavale miljardärile Richard Bransonile ja Chris Welshile, sest nende sõbra, suurseikleja Stive Fossetti peas oli sarnane idee keerelnud juba mitu aastat ning ta oli selliseks ettevõtmiseks tellinud isegi sobiva süvasukeldi neid ehitavalt Graham Hawkes’ilt (vt TM, 11/2011).
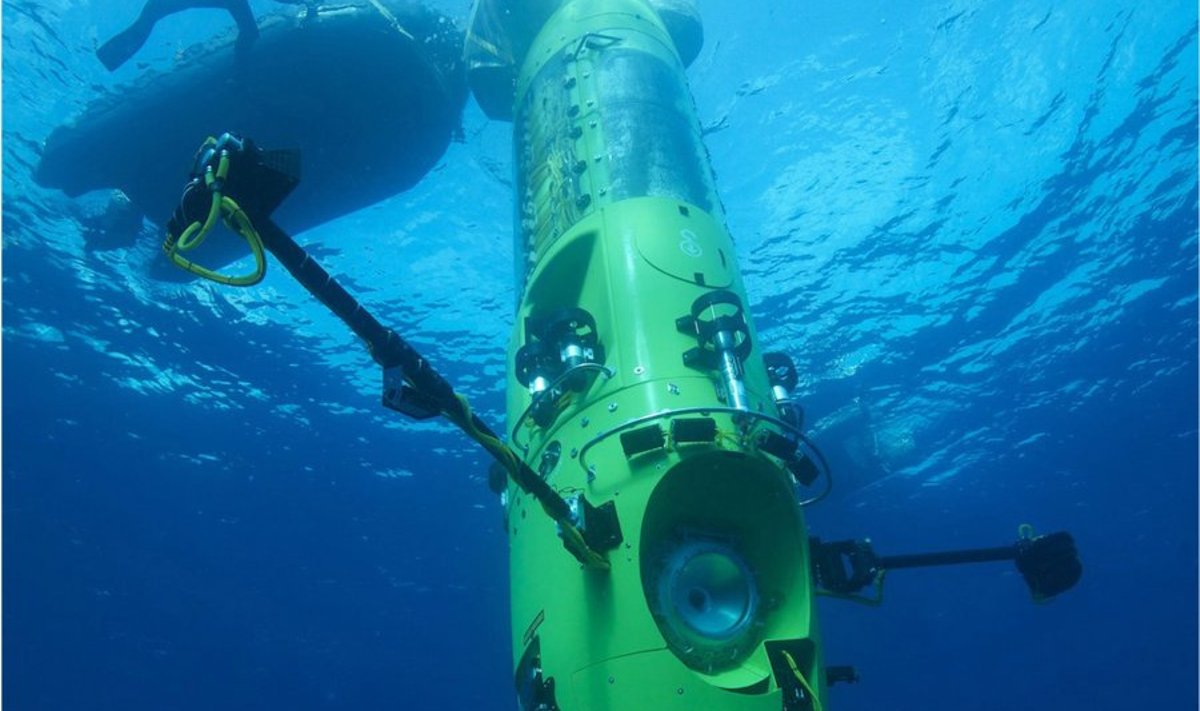
Aga neil polnud õrna aimugi, et sarnaseks ettevõtmiseks valmistus salaja kauges Austraalias ka kuulus filmirežissöör James Cameron (filmid „Titanic” ja „Avatar”), keda toetasid National Geographic Society ja Rolex, kusjuures ta plaanis teha sukeldumisest isegi 3D-video. Tema sukeldusvahendiks sai uus süvasukeldi Deepsea Challenger, mis sai hüüdnimeks „vertikaaltorpeedo” oma vees liikumise asendi tõttu, kus inimene pidi selles olema, pea alaspidi. Selle konstrueerimist juhtis Ron Allum Leichhardti töökodades Sydneys. Konstruktsioonis kasutati edukalt uudset sünteetilist vahtu Isofloat, mis koosneb sfäärilistest õõnsatest klaaskuulikestest epoksüvaigus eritihedusega 0,7. Energiallikatena kasutati liitiumakusid.
Kokku sisaldas sukeldi 180 tehnilist süsteemi, lisaks elutagamissüsteemile ja mootoritele ning proovivõtuseadmetele ka moodsad 3D-kaamerad, mis võimaldavad hiljem kaadrites tuvastada filmitud objektide mõõtmeid ning nende omavahelisi kaugusi, ja LED-valgustid. Süsteemid on omavahel ühendatud ja nende tööd juhib ja koordineerib programmeeritav automaatkontroller (PAC). Sukeldumise käigus registreerib see reaalajas sügavust, rõhku, temperatuuri, akude seisundit ja mitmeid muid parameetreid. 6,4 cm paksusest terasest seintega piloodikabiin oli hästi kitsas, läbimõõt vaid 1,1 m, nii et juht pidi olema praktiliselt ühes asendis. Tehnilisest progressist kõneleb ilmekalt see, et võrreldes oma eelkäija Triestega oli ta ligi 10 korda väiksem – kaal vaid 11,8 t, pikkus 7,3 m ja ballast 500 kg, mis ookeani põhjas enne tõusu algust eemale heideti.
Deepsea Challenger valmis eelmise aasta alguses. Esimesed kuud kulusid laevukese ja tema süsteemide toimimise kontrollimiseks ja Cameronil testsukeldumistel tööga harjumiseks. Süviku vallutamisele asuti 26. märtsil 2012. Vertikaaltorpeedo jõudis süviku põhja, kus sügavusmõõtja näitas 10 898,4 m, kõigest 2 tunni ja 36 minutiga, seega kaks korda kiiremini kui Trieste. Süviku põhjas viibis Cameron kolm tundi. Peaaegu kõik süsteemid töötasid korralikult, kaasa arvatud Rolex, mida kandis sukeldi robotkäsi. Streikis millegipärast sonarisüsteem ja häireid täheldati ka manipulaatorite hüdraulikas. Pinnaletõus läks libedalt ja kiiremini kui oodatud – kestis vaid 70 minutit.
Cameroni sukeldumist jälgis helikopterilt ka Microsofti kaasasutaja Paul Allen, kes ta ookeanist üles korjas ning saatelaevale transportis. Sukeldumine oli ülim proovilepanek nii tehnikale kui ka inimesele. 57aastane päevakangelane oli raskele füüsilisele ja vaimsele pingele hästi vastu pidanud. Cameroni esimeste õnnitlejate hulgas oli ka Trieste veteran Don Walsh (Jacques Piccard on juba surnud). Mitmete arvates pöörati selle sündmusega ühtlasi ka uus lehekülg süvasukeldumise tehnika ajaloos.
Cameroni „musta hobuse” trikk oli muidugi suureks moraalseks löögiks Bransonile, Welshile ja Hawkesile. Lihtsalt korrata kellegi saavutust – see ei olnud nende meeste loomuses, kes kõikjal tahtsid olla vaid esimesed. Tuli otsida uusi eesmärke. Üks neist oli sukelduda kõigi viie ookeani sügavaimatesse kohtadesse ning pühendada see 2007. aastal lennuõnnetuses hukkunud sõbra Steve Fosetti mälestusele. Selleks oli kavas kasutada maailma ühe juhtivama veealuste sõidukide konstruktori Graham Hawkesi loodud Deep Flight Challengeri, mis näeb välja umbes nagu veealune lennuk, sest tal on küljes tiivataolised pinnad, ainult et nad toimivad vastupidiselt – nende hüdrodünaamiline tõstejõud on suunatud allapoole ning aitab seepärast liikuda hoopis põhja suunas. Selle edasiarenduseks sai kahekohaline (mõlemad piloodid/reisijad eraldi üksteise taga paiknevates kabiinides) Deep Flight Super Falcon ja kolmekohaline Necker Nymph. Aeg näitab, kas mehed jõuavad ka tegudeni.
See on täiesti uue tehnikasuuna koidik ja meenutab mitmeti autode ilmumist sõiduvahendite hulka sada aastat tagasi. Nüüd on võimalik kihutada mitte üksnes maa peal, vaid ka vees, ning nautida lõunamerede maalilist ja värvikirevat korallide ning kaladega täidetud ümbrust mõnesaja meetri sügavusel, liikudes kiirusega 6 sõlme kuni viie tunni vältel. Selliste vahendite hinnad ületavad miljon dollarit, nii et nad on taskukohased muidugi miljardäridele, aga neidki on ju tuhandeid, mistõttu nende ehitamisega seotud äril on jumet.
Uusi tegijaid jätkub
Senini peaaegu uurimata või väheuuritud tohututes mereavarustes peituvate suurte ressursside avastamine ja majandustegevusse lülitamine nõuab ka sellekohase moodsa tehnika väljatöötamist. Viimastel aastatel on sellekohaseid näiteid lisandunud mitmeid.
1989. aastal alustas Jaapanis süvamereuuringuid kahe piloodiga Shinkai 6500 (sügav vesi), mis püstitas uue autonoomsete mehitatud laevade sukeldusrekordi 6527,5 m. Tema sukelduste koguarv ületab juba 1300. Laeva uurimisobjektide ja eesmärkide hulka kuuluvad maakera sisemuse liikumised, elusorganismide evolutsiooni selgitamine, süvameres elavate organismide kasutamine ja säilitamine, termiliste ja aineliste arengutsüklite hindamine.
Üks uusimaid autonoomselt töötavaid süvasukeldeid on ka 2010. aastal tööd alustanud Hiina kolmekohalineJiaolong (meredraakon), mis püstitas selle klassi uue rekordi, sukeldudes 27. juunil 2012 Mariaani süvikus 7062 m sügavusele. Sellega sai Hiina viiendaks riigiks maailmas, kelle vahendid suudavad sukelduda sügavamale kui 4 km. Aga kõik rekordid on ju selleks, et neid purustada.
