VIDEO: robotkäsi liigub nagu elevandi lont
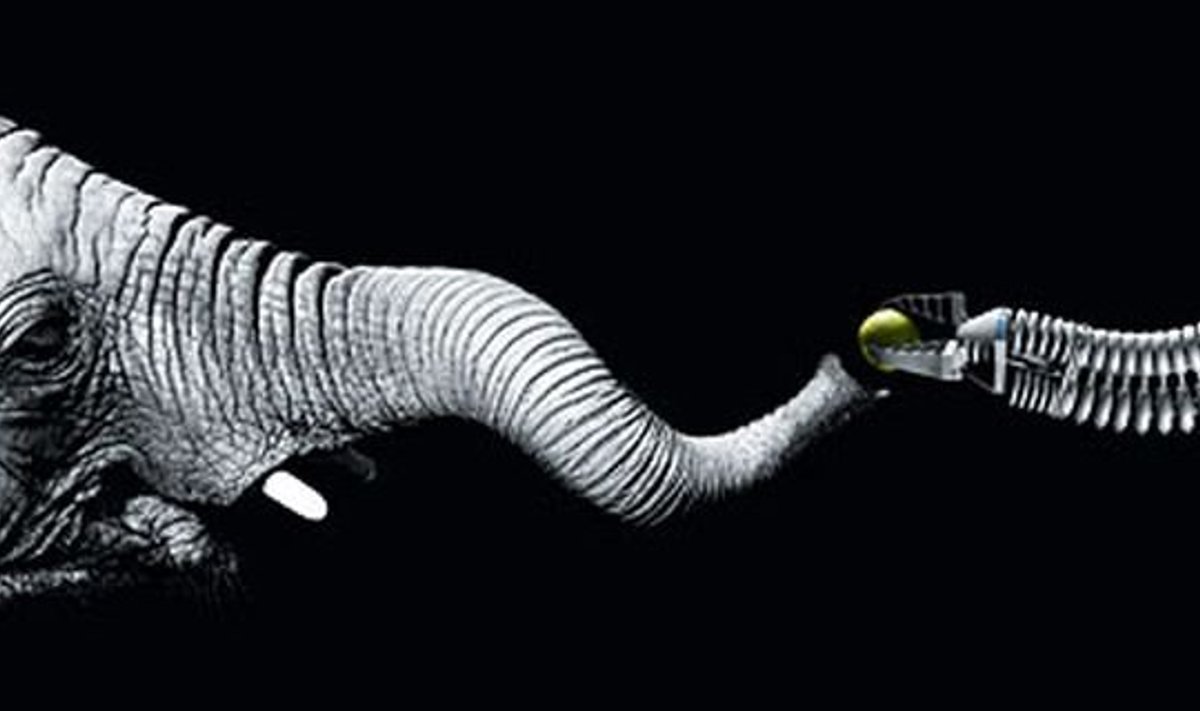
Loodus on robotiehituses üks peamisi inspiratsiooniallikaid ning elevandi lont on Saksamaal Denkendorfis asuv firma Festo ja Stuttgardi Fraunhoferi instituudi teadlaste koostöös olnud eeskujuks robotkäele, mis peaks olema piisavalt ohutu selleks, et inimestega samas keskkonnas koos tööd teha, vahendab Novaator.
Lontkäsi võiks leida rakendust näiteks meditsiini- ja hooldusasutustes, tootmisliinidel, koolides ja isegi kodudes.
Robotkäsi on valmistatud pehmetest polüamiidist tükkidest 3D printimistehnoloogia abil. Kätt juhib selle sees asuv väike õhukambritest koosnev pneumaatiline süsteem. Kahes reas paiknevaid õhukambreid täidetakse vastavalt sellele, kuidas käsi peab liikuma. Käel on kolm eri piirkonda, mida on võimalik eraldi juhtida, seega saab käsi painduda eri suundades, täpselt nagu elevant oma lonti painutab. Haaratsit juhib veel eraldi neljas pneumaatiline süsteem.
Robotkäsi on varustatud terve rea sensoritega, mis peaks vältima kokkupõrkeid teiste objektidega ja piirama käe liikumistrajektoori, kui lähedal asub muid objekte. See peaks tagama robotkäe ohutuse inimesele.
Uudne robotkäsi on nominent Saksamaa innovatsiooniauhinnale Deutscher Zukunftspreis. Varasemad sama projekti poolt väljatöötatud robotseadmed on võtnud eeskuju näiteks pingviinidelt, meduusidelt, raikaladelt ja kiilidelt.