EVIE - pisike veealune nuuskur leiab laevakerest salakauba üles
Lennujaamades on karmid turvakontrollid, et keegi salakaupa või näiteks lõhkekeha lennuki pardale ei toimetaks. Sadamates pole asi aga nii lihtne. laevu on palju ja nad on ka üsna suured, seega turvakontroll ei jõua kunagi iga nurgani, ammugi mitte peidetud kohtadeni alustes.
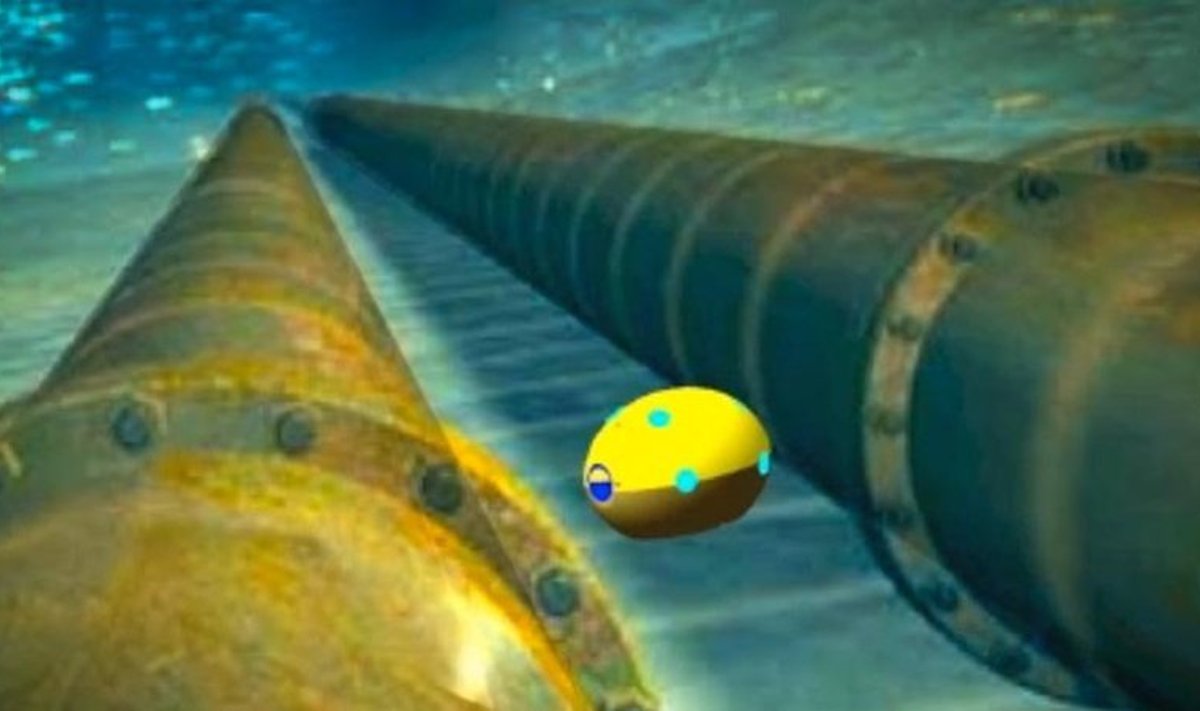
Massachusettsi tehnoloogiainstituudi (MIT) teadlased on nüüd lagedale tulnud oma lahendusega selles vallas. Sampriti Bhattacharyya koos kaaslastega esitles hiljutisel robootikakonverentsil lahendust nimega EVIE (Ellipsoidal Vehicle for Inspection and Exploration, ellipsikujuline inspekteerimise ja uurimise sõiduk), jalgpallisuurust robotit, mis veepinna all ujuks laevakereni, et ultraheli kasutades laevakeres peidetud kambreid ja sealt ka salakaupa üles leida.
Niisiis, edaspidi, kui laeva meeskond näeb sadamas veealust ümmargust eset alusele lähenemas, ei pea nad tingimata halvimat kartma. Pommi või miiniga tegemist ei ole.
Ellipsikujulise aparaadi plastikust kere on jagatud kaheks. Ülemine 3D-prinditud poolkera sisaldab kuuest veepõtkurist koosnevat liikumismehhanismi, mis annab sellele liikumiseks kiiruse kuni 3,2 km/h, alumine poolkera sisaldab veekindlas keskkonnas aga elektroonikat, liitium-ioonpatareid, liikumissensoreid, keskprotsessorit, juhtmevaba raadiot ja kaamerat.
Selleks, et voolujoonelisust parandada, on põhja ka lapikumaks pressitud, vahendab Smithsonianmag.com MIT enda pressiteadet. Aparaadi läbimõõduks on veidi enam kui 20 sentimeetrit. Probleem - patareid jätkub korraga vaid 40-minutiliseks veealuseks reisiks.
Esialgu töötati seda väälja hoopis selleks, et tuumajaamade veemahutite seisundit kontrollida, aga tööde käigus leiti robotile hoopis laiemat otstarvet. Ja huvi on mõistagi ilmutanud ka jõustruktuurid, et leida merel smugeldatavaid tuuma-, bio- või keemiarelvi.
Masstootmises asi küll veel ei ole, sest enne seda peavad aparaadi leiutajad selle manööverdusvõime parandamisega tõsiselt vaeva nägema. Aga sadamate juhid võtku sellise seadme hankimine juba oma tulevikukavadesse.